Cinnamon: Cleaning elevated.
Home-built window washing drone

List of projects completed both outside of class and for various classes. When a project was part of a class project, it is noted accordingly in the project description.
Home-built window washing drone
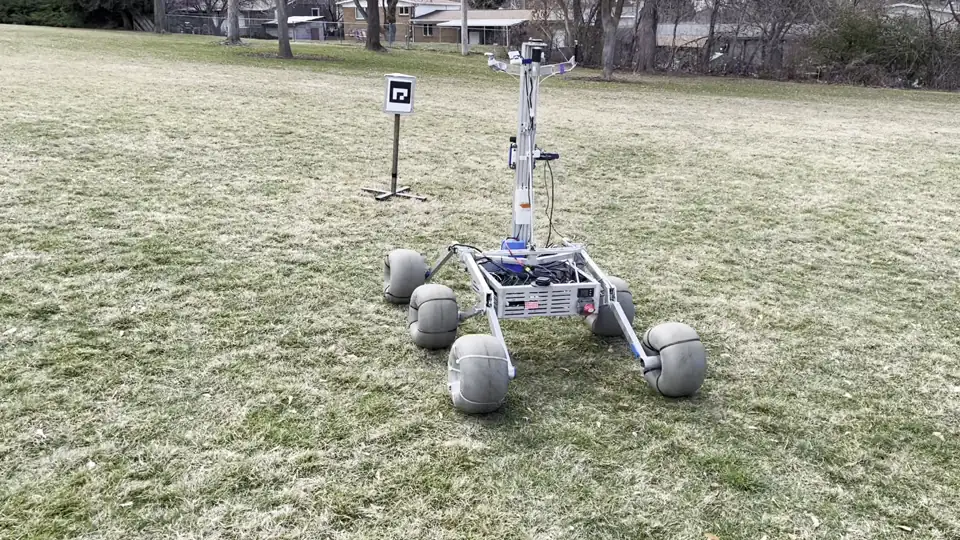
Scored 3rd place (internationally) at University Rover Challenge
Cheapest compliant option on the market (briefly)
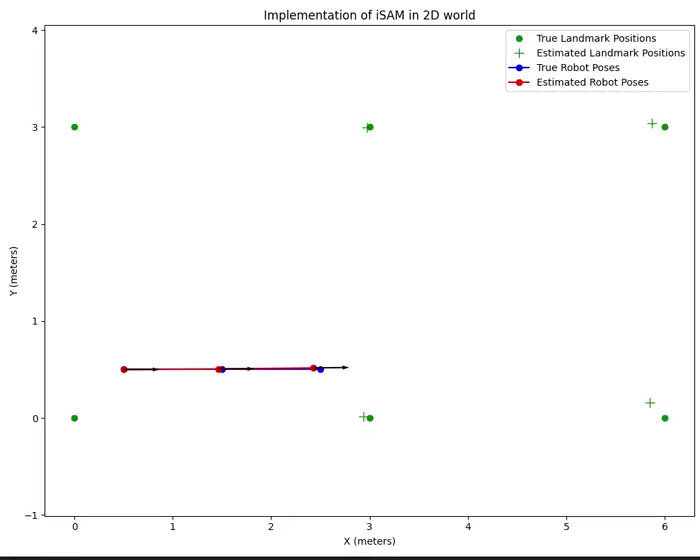
Implementation of iSAM for simplistic robot environment
Catching a baseball from a pitching machine - Computer vision project
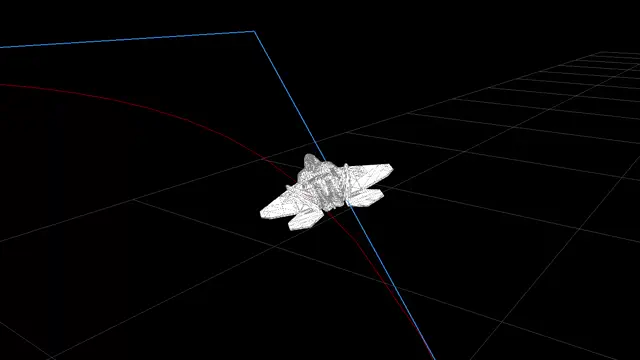
Implementation of an error-state Kalman filter on SE(3)
Test-driven development, clean code, C++, VTK, Qt6